Running ROS, ros_controller and Moveit
This section is focused to guide you through the proccess of establish contact with the UR5 using ROS and Moveit in a safety way.
Pre-requisites
In order to be able to control the UR5 remotely, you should have installed the following components/software:
- A computer running a LTS version of Linux (Ubuntu 14.04 LTS is strongly recommended). Ubuntu can be downloaded from Canonical webpage [1].
- Have installed a version of ROS (Indigo) [2].
- ROS-Industrial's universal_robot package [3].
The universal_robot package must be installed into the src folder which is created once the catkin workspace has been fully build into the host computer. For further information about installation procedures please go to the following link: ROS webpage
Additional Requirements
There are another packages which are necessary when running universal_robot and moveit_onfig packages. These packages are required when some programs perform specific calculation during the execution time. These packages are those shown in the following list:
geometric_shapes. Installation procedure:
$ cd ~/catkin_ws/src $ git clone https://github.com/ros-planning/geometric_shapesmoveit_commander. Installation procedure:
$ cd ~/catkin_ws/src $ git clone https://github.com/ros-planning/moveit_commander
These packages must be downloaded in your catkin_ws/src folder as well as the IGM's packages. The tree directory is shown in the figure:
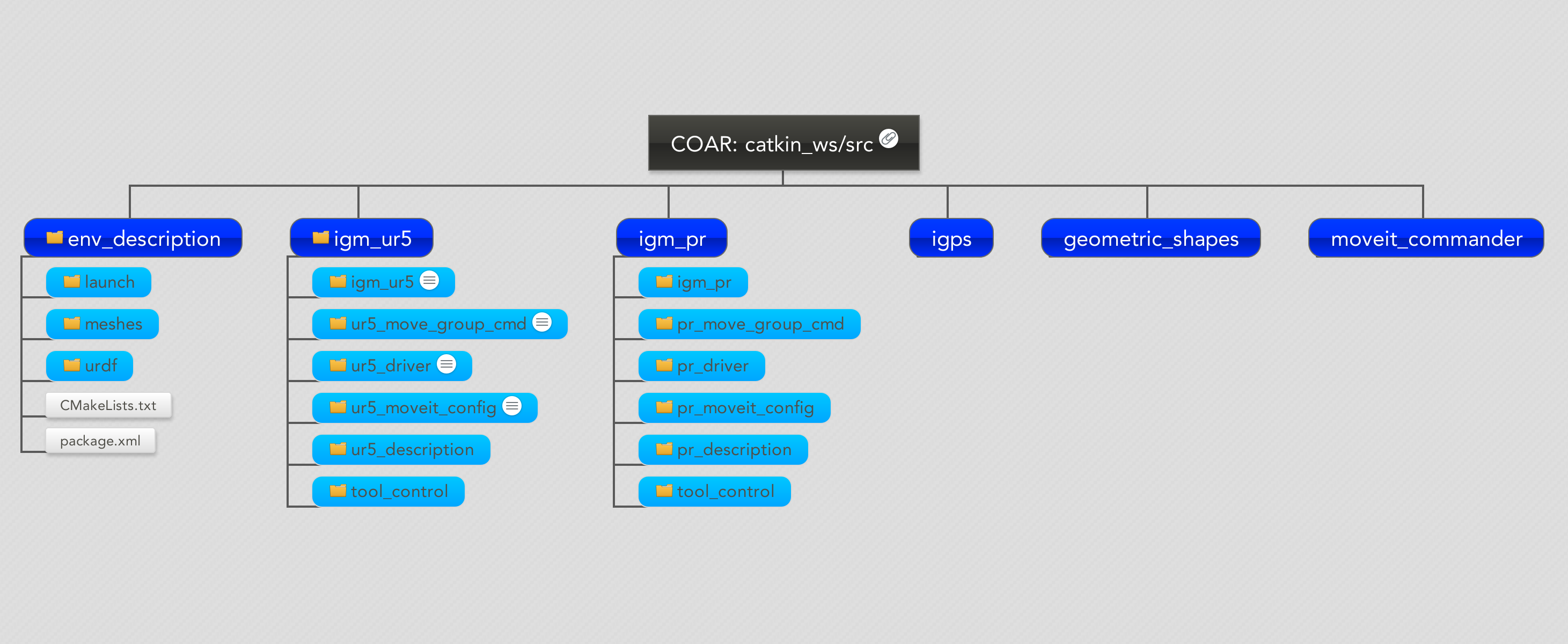
Catkin workspace
In order to be able to launch the ROS environment and the other different packages, it is necessary to get the catkin workspace properly configured. If a catkin workspace has been previously set it up, run the following code lines on the console (one by one):
$ cd ~/catkin_ws/build
$ cmake ../src
$ make
$ make install
$ cd ..
$ catkin_make
References
| 1 | Canonical, {Ubuntu}, |
| 2 | ROS, {ROS Indigo}, |
| 3 | {ROS Industrial}, {Universal Robot}, |

Universal Robot 5 Manual by Jorge De La Cruz is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.