Network Configuration
Once ROS, ros_control, Moveit and the universal_robot package have been installed in the controlling computer, the next step is checkout whether the UR5 has access to the Network or not. In order to know this, follow the next (view figure) steps:
- Connect a keyboard to the Polyscope, and turn on the UR5.
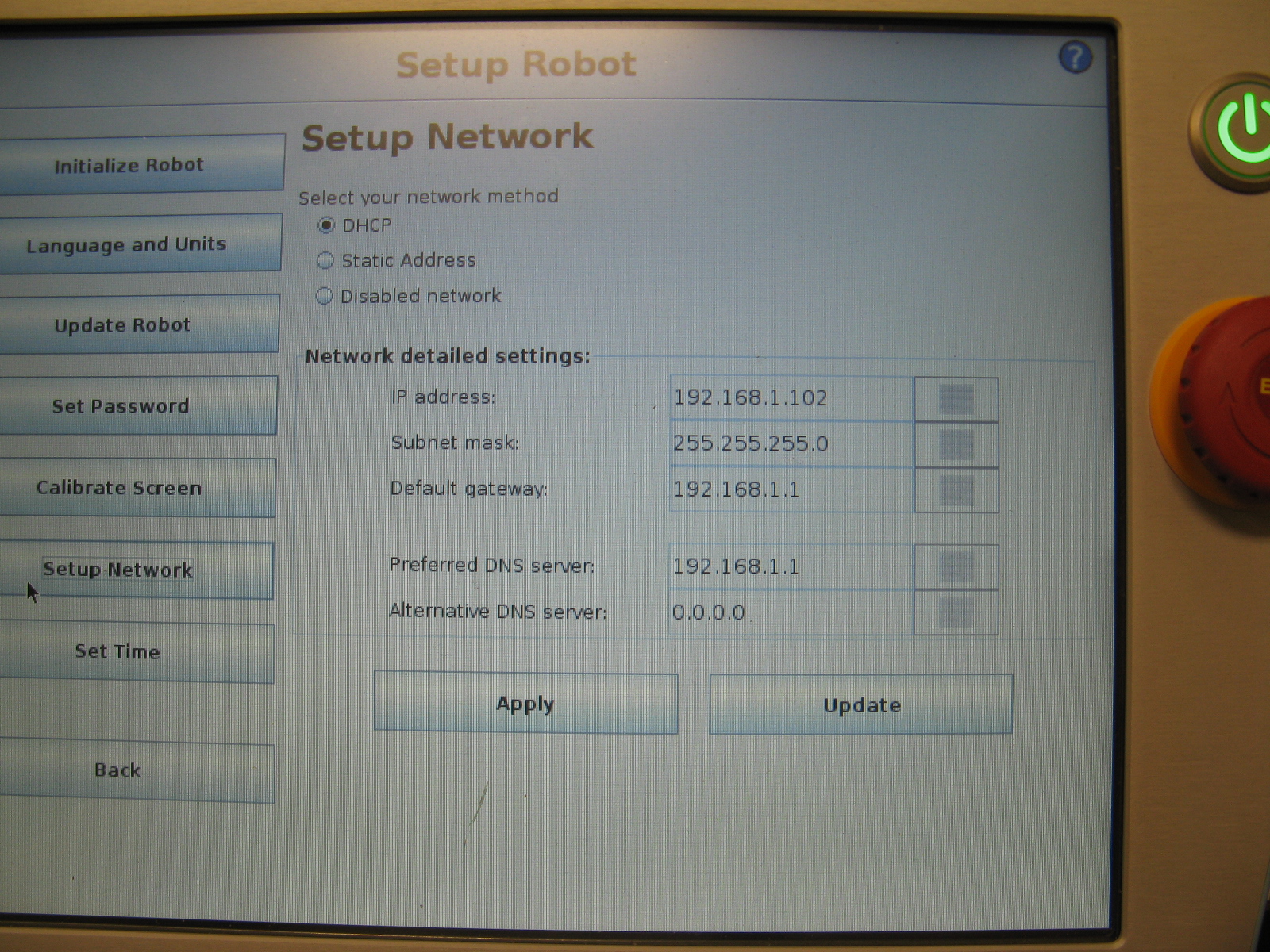
- Verify the UR5 has access to the network, in order to do this go to the Setup Network Menu and be sure that the option Disabled network is not selected (view figure).
- Log in into the home directory in the Linux shell (press
ctl-alt+1) and type./netconf-steuerung.1 - Ping to another computer on the red
ping 134.130.201.250for example. If you receive response means the network has been property configured.
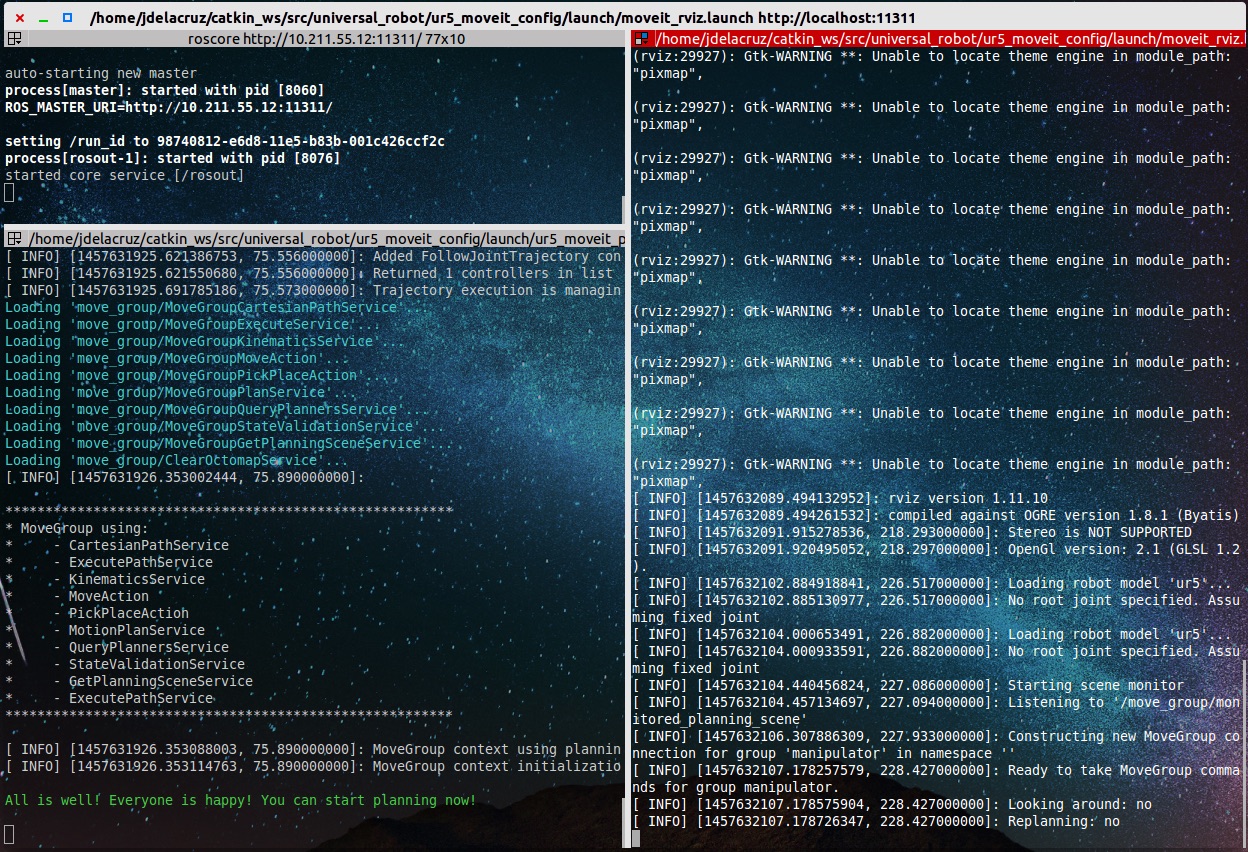
After this, verify if the controlling computer is able to reach the UR5 through the network using the ping tool from the Linux shell, ping ROBOT_IP.
Warning! Notice you do not need to install any software in the UR5, the only thing you need to do is to be sure the UR5 is already connected to the LAN.
1. user: root. Password: easybot ↩

Universal Robot 5 Manual by Jorge De La Cruz is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.