Using Moveit
Another option for performing a movement in the UR5 (or planning trajectories) is to use Moveit, which is a tool that provide us with diverse kind of features, it makes easier to program trajectories and sync movement. In this case, we need to run the following command in order to build Moveit into ROS.
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch limited:=true
Remember The UR5 procedures pointed out in section making must had been done before you launch Moveit. The next step should be count with a viewer which allows us to interact with the real robot from our computer, in this case Rviz is recommended:
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
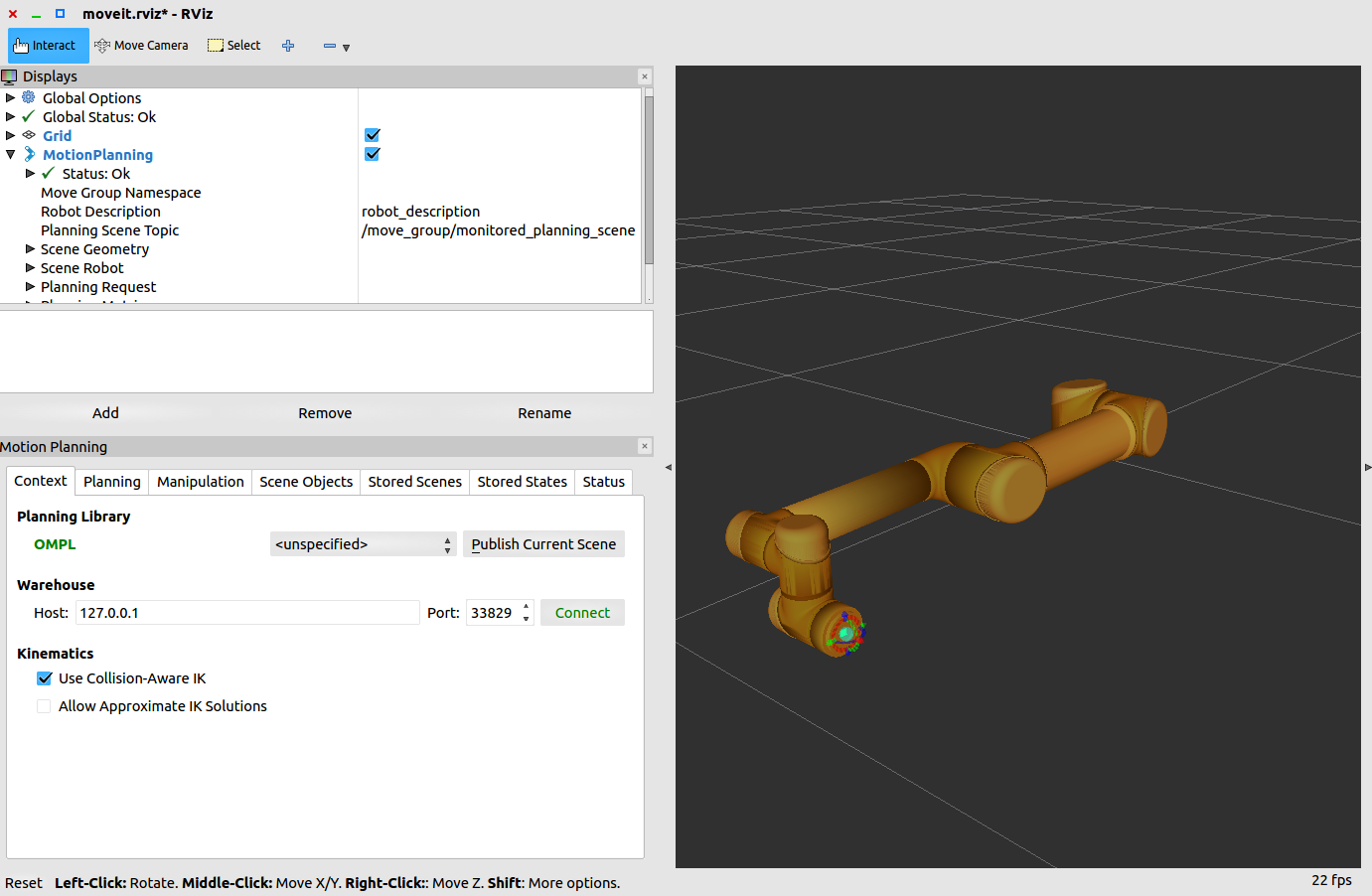
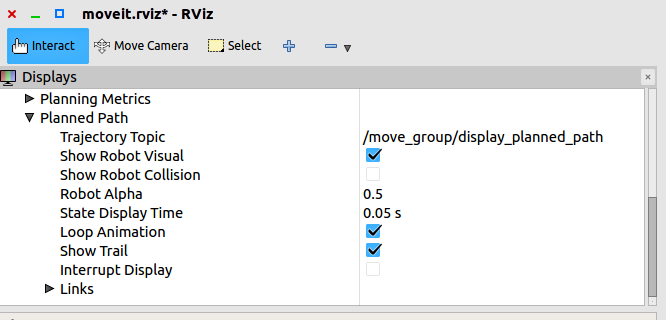
Once ROS, UR5 Gazebo model (or the real robot) and Rviz have been bringing up, it is possible to use the mouse and drag and drop the reference frame attached to the end effector of the UR5 arm and plan a desired trajectory. It is recommended to check the option Show Trail so we can be able to verify the path which is planned when the procedure is performed. If the option mentioned above has been check it, you should see something like the path which is shown in the figure \ref{trail}.


Universal Robot 5 Manual by Jorge De La Cruz is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.